Triangles Speedup – call for beta testers#
We are excited to announce that significant performance improvements are coming to napari Shapes layers.
Shapes layers in napari represent 2D geometric objects, — rectangles, circles, polygons, paths… — possibly embedded in a higher-dimensional space, for example, 2D polygons of cell outlines within a 3D image stack. Vispy, which powers napari’s graphics, uses OpenGL to draw on the screen. The fundamental unit of OpenGL graphics is triangles, which can be put together to draw more complex shapes such as polygons. This means that we have a preproprocessing step in napari to break down input shapes into triangles. This step is called triangulation.
Until now, we have been using an algorithm called Constrained Delaunay
Triangulation
(1,2),
implemented in pure Python in Vispy. This has been a performance bottleneck
when creating Shapes layers with thousands to hundreds of thousands of shapes.
(An optional dependency triangle
can be used to speed things up, but because it uses a proprietary license, we
cannot ship it by default and we cannot use it in the napari bundled app.)
Thanks to the SpatialData community, which
decided to sponsor this work, we were able to implement a faster algorithm for
rendering triangles used for rendering geometries in a napari shapes layer.
(SpatialData is a framework for the representation of spatial multimodal omics
data and part of the single-cell omics analysis suite
scverse.)
We have tested the new implementation on a few example datasets of SpatialData, and we see a significant speedup. For example, in this Xenium Human Lung Cancer dataset from 10x Genomics (available in the SpatialData Zarr format using these scripts), the cell boundaries are stored as 162,000 polygons. When visualizing these polygons in napari, creation of the shapes layer drops from almost 4 minutes (napari 0.4.19) to just 20 seconds! (Ubuntu 20.04 with Intel Core i7-8700 CPU @ 3.20GHz) Most of the time creating a Shapes layer with so many shapes was spent on triangulation, which takes just 2.5s with our changes.
We obtain this dramatic speedup through a combination of algorithmic changes (using the sweeping line triangulation algorithm from 3) and code changes — implementing the algorithm in C++ instead of pure Python.
For now, our fast triangulation is implemented in
PartSegCore-compiled-backend, a compiled Python package I was already
distributing for PartSeg, which is the main
software output of my PhD and the work that brought me to napari and eventually
the napari core team.
In the near future we plan to create the bermuda package (yes, because of the
Bermuda triangle — and with thanks to Aperio’s
Thomas Robitaille a.k.a. astrofrog for the PyPI package name!), which will
contain fast spatial algorithms for the napari Shapes layer and beyond.
We plan to develop in Rust which seems to give us even faster
performance on top of better memory
safety guarantees. Plus all those shipwrecks are probably pretty rusty!
In the meantime, this is brand-new work and the first foray into compiled code directly for napari, so we are looking for beta testers. If you use the Shapes layer, please read on for how you can help, while also benefit from the increased performance that this work brings!
How to use it today#
This feature requires napari in version at least 0.5.6. As of this writing, a pre-release version of napari 0.5.6 is available on PyPI.
You can install the pre-release using pip by specifying a version:
pip install "napari[optional,pyqt6]>=0.5.6rc0"
The “optional” flag ensures that you get the compiled extensions mentioned in this post.
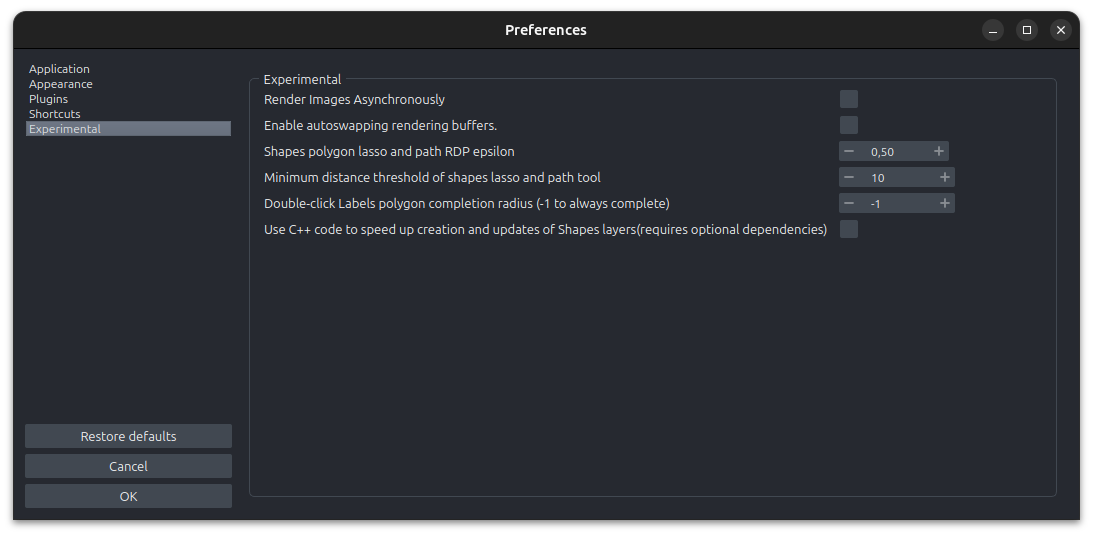
Since this code is experimental, we have made it opt-in in napari preferences to enable using it. To enable it, open napari, and open the menu File → Preferences, then open the Experimental tab and enable the checkbox for “Use C++ code to speed up creation and updates of Shapes layers”.
You can also toggle it using the COMPILED_TRIANGULATION environment variable,
for example launching napari using the terminal command
COMPILED_TRIANGULATION=1 napari, or COMPILED_TRIANGULATION=1 jupyter lab
and then using napari within Jupyter.
If you spot any issues (visual or functional), please let us know in our Zulip chat room, or create an issue on our GitHub repo. You are also welcome to come ask for help in our community meetings.
Ongoing work#
During our own testing, we sometimes observed crashes because of floating point precision issues. Although we’ve worked around those issues for now, it’s possible more issues are lurking. Ultimately, we may need to move to algorithms resistant to floating point approximation errors, which are known as numerically stable methods.
This work has focused on the initial triangulation step in the construction of napari Shapes layers. We haven’t (yet) updated the triangulation code when editing layers with hundreds of thousands of shapes. Currently, all triangles in a Shapes layer live in a single big NumPy array — which means that if we update a shape, the whole array needs to be recomputed! 😵 This is fine for small datasets but can result in freezes of several seconds when editing or adding shapes to a list of 100,000+. There’s lots of ways around this but we have yet to implement any — so, unfortunately, performance issues while editing may not be improved by this work.
napari has longstanding issues displaying polygons with holes in them. This work does not address them but opens the door to doing so very efficiently. If you’ve been waiting for that, stay tuned!
Finally, as mentioned above, our immediate next step is to move the code to Rust in the bermuda package. We hope to make it a core dependency of napari sooner rather than later, which will open the door to many speedups in napari! 🚀 So look forward to that.
Call for help 2#
All this work is happening because Python (and Pythonic) libraries for spatial algorithms are pretty thin on the ground. We’re also mostly noobs at Rust so if you are interested in fast spatial algorithms, Rust, and n-dimensional data visualization, we could use your help! Please have a look at our Community page and join us in our Zulip chat room or come to a meeting suitable for your time zone! We’d love to hear from you.
Acknowledgments#
This work is made possible by a Data Insights grant from the Chan Zuckerberg Initiative to the SpatialData team. We want to acknowledge the team’s support for napari upstream, and highlight how individual grants can be used to support collective software efforts that help thousands of users. We will have more to say on this in an upcoming blog post. Finally, we also want to thank the scverse team, a consortium of open-source developers dedicated to single-cell omics.
Luca Marconato, Juan Nunez-Iglesias, Peter Sobolewski, and Wouter-Michiel Vierdag helped with the writing of this post.